- On-Device AI Autonomous Driving Vehicle Training Equipment
- High-performance on-device AI platform of NVIDIA is adopted for the Brain Board
- Built-in high-resolution wide-angle camera for deep learning-based autonomous driving practice
- Built-in 9-axis high-precision IMU sensor for path tracking and vehicle posture control
- Built-in high-precision serial servomotor for more accurate steering control
- Built-in DC motor with encoder and high-efficiency dual motor driver to increase driving accuracy
- Motor, encoder, and sensor control with a controller equipped with a high-performance MCU for precise control of the driving unit
- Connect brain board and controller with highly reliable CAN FD communication
- Built-in Gigabit Ethernet, dual-band Wi-Fi, and Bluetooth for IoT connectivity applications
- Built-in digital microphone and speaker for voice recognition and audio playback
- Built-in power path management circuit enabling practice even while the battery is charging
- Indoor or indoor/outdoor DToF lidar for SLAM and path planning applications
- Selectable sensor pack with built-in breadboard to use various IoT sensor modules
- Selectable touch display to implement GUI-based user interface
- Provides high-level Pop Library to help focus on implementing autonomous driving
- Supports autonomous vehicle applications based on robot standard middleware ROS2 and Pop Library
- Supports CUDA-based PyTorch and Tensorflow artificial intelligence framework
- Supports web browser-based Google block coding platform (Blockly)
- Supports pre-set integrated development environment based on Visual Studio Code for professional application development
- Provides learning contents for self-driving cars based on deep learning
Operation Program
| List | Specifications | |
| Linux OS | Desktop | X-Server, Openbox, LightDM, Tint2, blueman, network-manager, conky |
| CLI | Zsh, Tmux, Peco, powerlevel9k theme, Powerline fonts, Powerline fonts | |
| Tool Chain | GCC, JDK, Node JS, Python3, Clang | |
| Connectivity | Mosquitto(MQTT), Bluez, mtr, nmap, iptraf, Samba, Blynk Server, Remote Desktop Server | |
| Multimedia | portaudio, sox, OpenCV 4, Google Assistant | |
| Data Science & AI | Python3, Numpy, Matplotlib, sympy, Pandas, Seaborn, Scipy, Gym, Scikit-learn, tensorflow, Keras | |
| Middleware | ROS2, Rviz2, RQt, ament, RTPS, Fast DDS, TF2 | |
| Pop Library | Output Object | Led, Laser, Buzzer, Relay, RGBLed, DCMotor, StepMotor, OLed, PiezoBuzzer, PixelDisplay, TextLCD, FND, Led Bar |
| Input Object | Switch, Touch, Reed, LimitSwitch, Mercury, Knock, Tilt, Opto, Pir, Flame, LineTrace, TempHumi, UltraSonic, Shock, Sound, Potentiometer, Cds | |
| SoilMoisture, Thermistor, Temperature, Gas, Dust, Psd, Gesture | ||
| Multimedia | AudioPlay, AudioPlayList, AudioRecord, Tone, SoundMeter | |
| Voice Assistant | GAssistant, create_conversation_stream | |
| AI | Linear Regression, Logistic Regression, Perceptron, ANN, DNN, CNN, DQN, Object Follow, Track Driving, YOLO | |
| PC linkage development environment | Jupyter Lab | Python3 and Cling support, IPython Widgets, Terminal support, Pop Library support |
| Visual Studio Code Insiders | Remote SSH, Python3 and Debugging support, Terminal support, Pop Library support | |
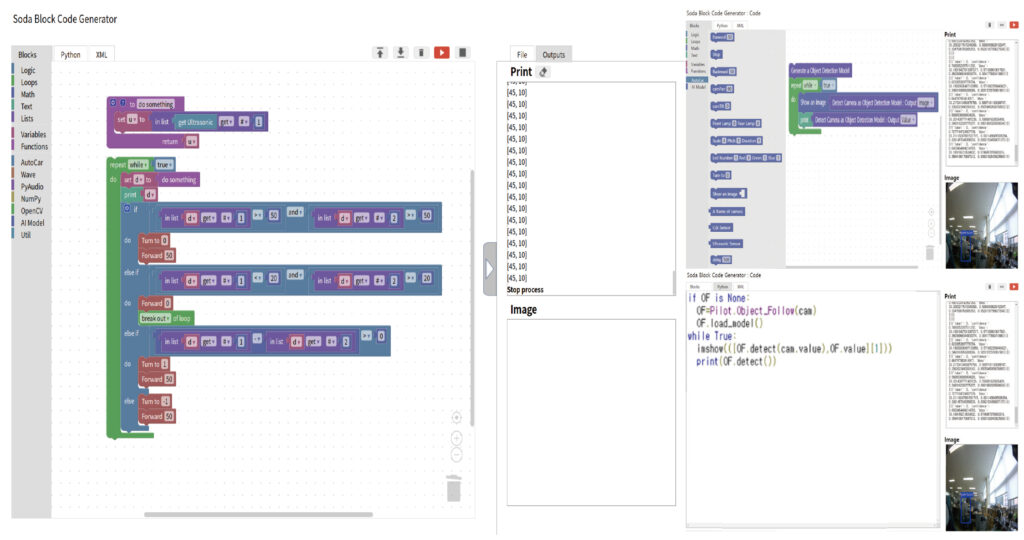
Block-Based Programming
Training Contents
DDS/RTPS Network-Based Autonomous Driving Vehicle Control in ROS2 Environment
- WSL2-Based Linux Development Environment
- Understanding Python Syntax for ROS2
- Understanding Network Programming for ROS2
- ROS2 Installation and Environment Configuration
- Understanding Node, Topic, Service, and Parameter Action
- ROS2 Build Environment
- Publisher and Subscriber Nodes
- Services and Customized Interface
- Actions and Multi-Node
- Launch and Multi-Execution
- Advanced ROS2
Deep Learning-Based Autonomous Driving Technology
- WSL2-Based Linux Development Environment
- Supervised Learning and Unsupervised Learning
- Linear Regression and Logistic Regression
- ANN, DNN, CNN Basics
- Understanding Machine Learning Framework
- High Speed Multidimensional Matrix Library
- Time Series, Table Data Analysis Library
- Data Visualization Library
- Overview of Autonomous Driving Technology
- Basic Driving and Remote Control
- Collision Prevention and Follow Object
- Transfer Learning
- Advanced Autonomous Driving
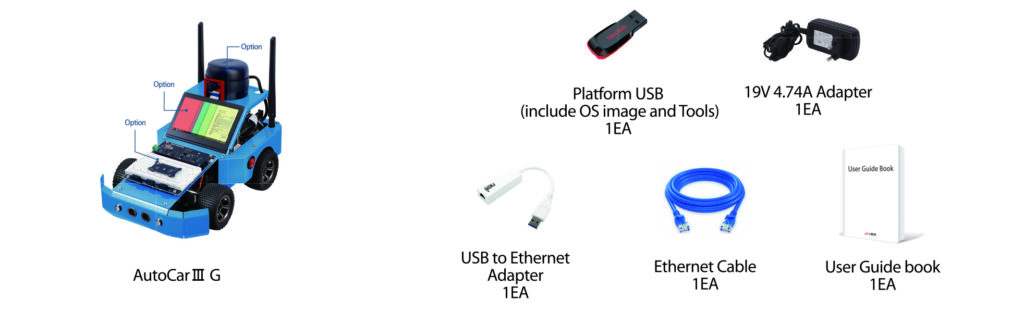
Layout

Components